
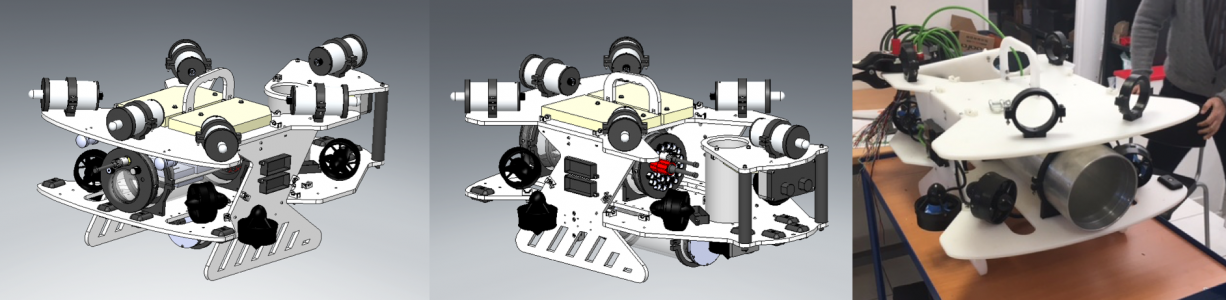
Welcome to the new prototype v4
After a series of tests we have noticed that the sonar tracking only, would not be enough in terms of the level of accuracy we are aiming at. Therefore we are developing a dual system whereby the sonar tracking is combined with an intelligent video one: this enables to supplement the ultra-sound acoustic recognition with picture recognition.
This new prototype will be operational in December 2016. It will enable to follow a diver autonomously with all his movements using four degrees of freedom, and to film the surrounding environment. Though it is neither a true representation of the actual design nor the final size, it allows us to facilitate the testing, with the goal of miniaturizing it later.
We are developing iBubble using Lean Startup method. The fast successive releases of prototypes are going to permit us to test quickly both our hardware and software developments. We are going to offer them for testing to our future user, in order to benefit from their feedback during all the stages of their experience.
Very soon we will be able to show you some videos of prototype v4 and newer versions in different situations. Our objective is to have them tested by a panel of beta-testers.